


OC-450A-IMU Inertial Navigation


3-axis Digital Gyroscope: +/-450°/s Dynamic Range; Bias Stability: 3°/h (GJB, 10s, 3-axis)
Features RTK differential positioning capability
Accelerometer: +/-16g dynamic range; Bias stability: 0.2mg (GJB, 10s, triaxial), 0.03mg (Allan)
High reliability: MTBF > 20,000h
Guaranteed accuracy over the full temperature range (-40°C ~ 70°C): Integrated high-performance temperature calibration and compensation algorithms
Suitable for operation in high-vibration environments
Low latency, under 3ms
Rich Interfaces: 1x UART, 1x SPI, 1x CAN
- Description
- Datasheet
- Outline
- Reviews (0)
Description
The OC-450A-IMU isa 7-DOF (Degrees of Freedom) Inertial Measurement Unit based on MEMS technology. It integrates high-performance MEMS gyroscopes and accelerometers to output 3-axis angular velocity and 3-axis acceleration, alongside data from an integrated barometer. The product is characterized by high reliability and excellent environmental adaptability. By utilizing different software configurations, the OC-450A-IMU can be widely applied in autonomous driving, tactical and industrial UAVs, smart munitions, seekers, SATCOM-on-the-move (SOTM), surveying and mapping, stabilized platforms, and various other fields.
OC-450A-IMU |
|
|
OC-450A-IMU Inertial Navigation |
|
Property |
Value |
|
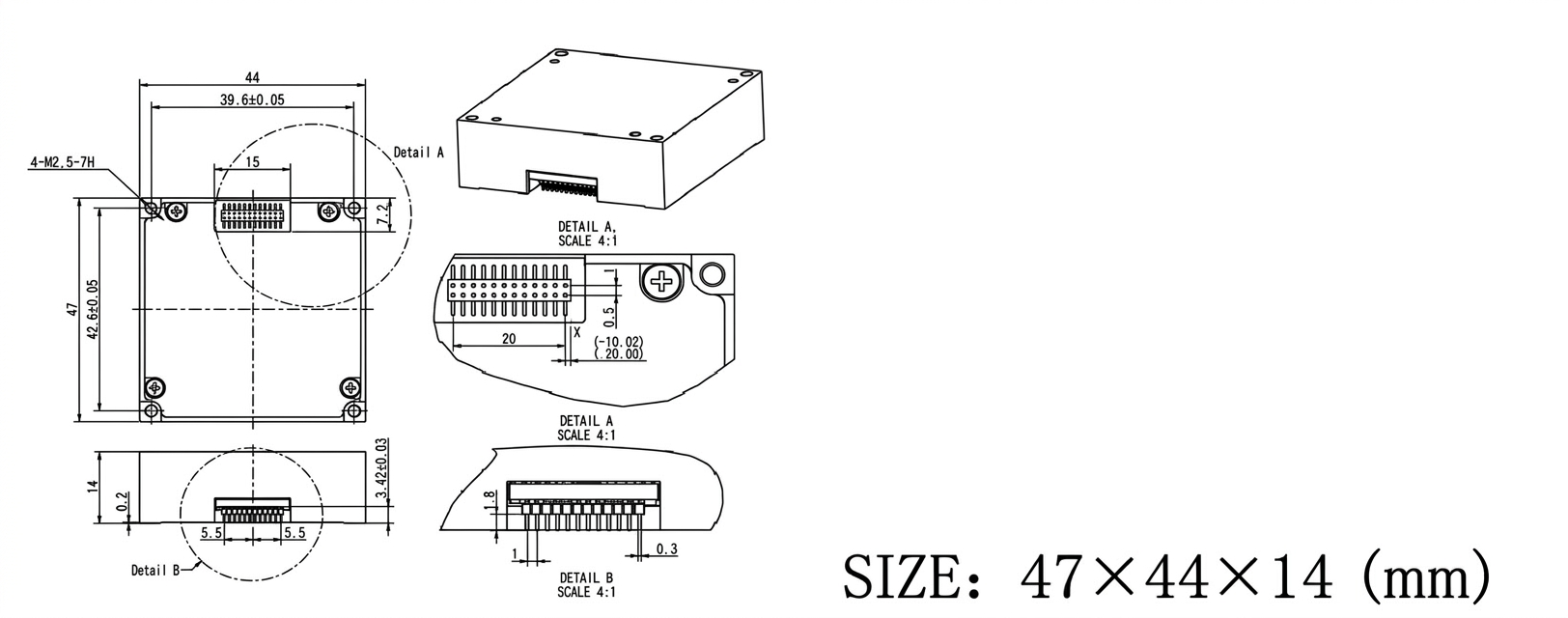
Dimensions |
47 x 44 x 14(mm) |
|
Weight |
< 50g |
|
Voltag |
3.0-3.6 V |
|
Resolution |
1.221 x 10^-8 g/LSB |
|
Bandwidth |
200Hz |
|
Delay |
5ms |
|
Communication Interfac |
RS422, SPI/UART/CAN |
|
Sampling Rat |
200Hz |
|
Power Consumption |
2W |
|
Size / Dimensions |
176.8 × 188.8 × 117 (mm) |
Features |
|
|
3-axis Digital Gyroscope: +/-450°/s Dynamic Range; Bias Stability: 3°/h (GJB, 10s, 3-axis) |
|
|
Features RTK differential positioning capability |
|
|
Accelerometer: +/-16g dynamic range; Bias stability: 0.2mg (GJB, 10s, triaxial), 0.03mg (Allan) |
|
|
High reliability: MTBF > 20,000h |
|
|
Guaranteed accuracy over the full temperature range (-40°C ~ 70°C): Integrated high-performance temperature calibration and compensation algorithms |
|
|
Suitable for operation in high-vibration environments |
|
|
Low latency, under 3ms |
|
|
Rich Interfaces: 1x UART, 1x SPI, 1x CAN |
|
Applications |
|
|
It can be widely applied in autonomous driving, tactical and industrial UAVs, smart munitions, seekers, SATCOM-on-the-move (SOTM), surveying and mapping, stabilized platforms, and various other fields. |
|
Reviews
There are no reviews yet.