


OC-100AL Integrated Inertial Navigation System

Integrated 6 deg/h (Allan Variance) MEMS Gyroscope
Integrated 150 ug (Allan Variance) MEMS Accelerometer
Dual-Antenna GNSS Integration
Integrated INS/GNSS/Odometer/DVL Navigation
Supports Dual-Antenna Heading, RTK, and Zero Velocity Update (ZUPT)
High Reliability and Robust Environmental Adaptability
Widely applicable to UAVs, Surveying & Mapping, Marine Compasses, etc.
- Description
- Datasheet
- Outline
- Reviews (0)
Description
OC-100AL isa general-purpose MEMS inertial navigation system featuring built-in MEMS gyroscopes with 6 deg/h (Allan variance) bias stability and MEMS accelerometers with 150 ug (Allan variance) bias stability. It integrates dual-antenna GNSS and provides functionalities such as inertial/satellite/odometer/DVL integrated navigation, dual-antenna heading determination, RTK, and Zero Velocity Update (ZUPT). The product offers high reliability and strong environmental adaptability. Through different software configurations, it can be widely applied in UAVs, surveying and mapping, marine compasses, stabilized platforms, underwater vehicles, and other fields.
OC-100AL |
|
|
OC-100AL Integrated Inertial Navigation System |
|
Property |
Value |
|
Heading Accuracy (Functional Items) |
Heading Hold (GNSS Outage) |
|
Heading Accuracy (Technical Specifications) |
0.2 deg /min (RMS) |
|
Attitude Accuracy (Functional Items) |
Attitude Hold |
|
Attitude Accuracy (Technical Specifications) |
– |
|
Chip Dimensions (mm) |
11 x 15 x 3 |
|
Chip Weight (g) |
1 |
|
Chip Interface Connector |
44-ball Ball Grid Array (BGA) |
|
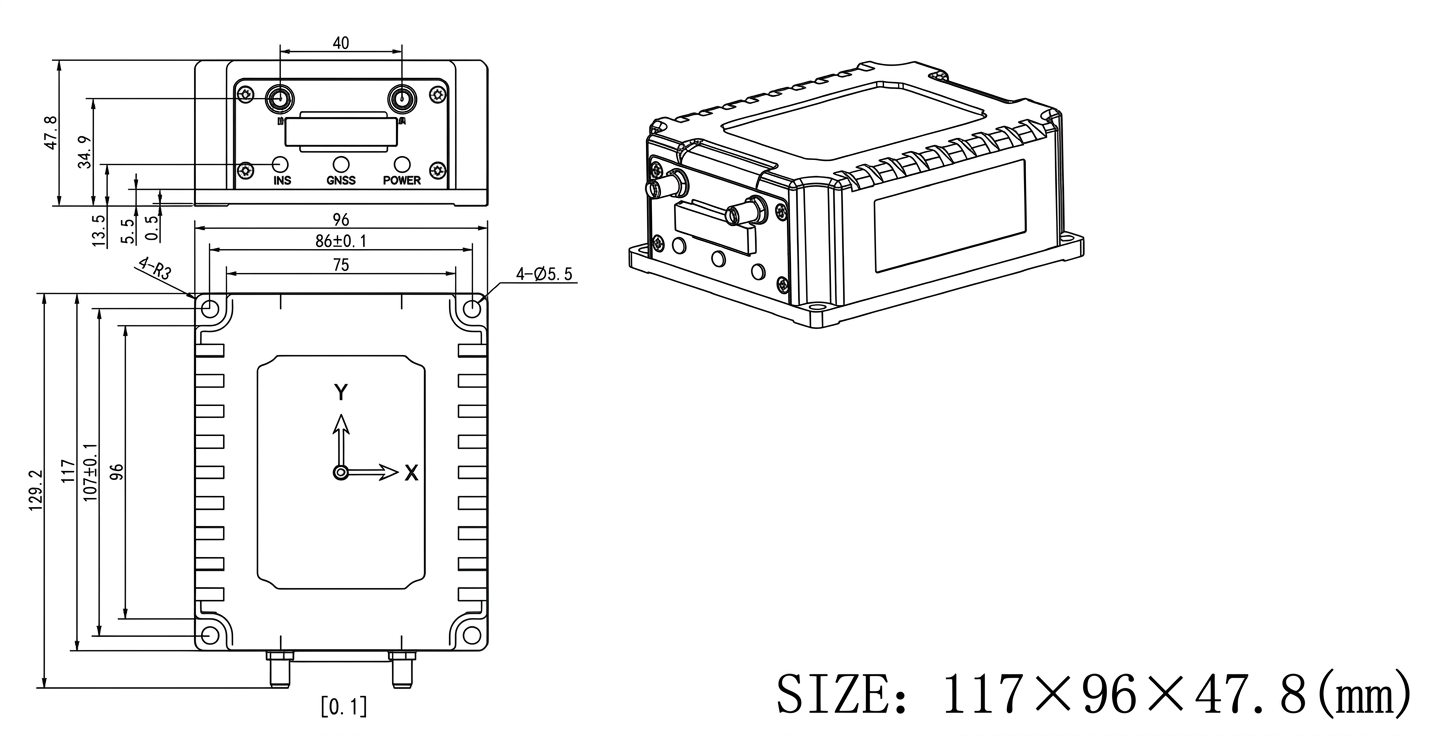
Overall Dimensions (mm) |
117 x 96 x 47.8 |
|
Operating Temperature ( degC) |
-40 to 85 |
|
Storage Temperature ( degC) |
-55 to 85 |
|
Gyroscope Range (deg/s) (TYP1 / TYP2) |
+/- 400 |
|
Gyroscope Bias Stability (deg/hr) (TYP1 / TYP2) |
2 |
|
Gyroscope Bias Stability (deg/hr) (Limit) |
4 |
|
Gyroscope Scale Factor Accuracy (%) (TYP1 / TYP2) |
0.01 |
|
Gyroscope Scale Factor Accuracy (%) (Limit) |
0.1 |
|
Gyroscope Non-linearity (% FSR) (TYP1 / TYP2) |
0.02 |
|
Gyroscope Non-linearity (% FSR) (Limit) |
0.1 |
|
Gyroscope Angle Random Walk (deg/sqrthr) (TYP1 / TYP2) |
0.2 |
|
Gyroscope Angle Random Walk (deg/sqrthr) (Limit) |
0.4 |
|
Gyroscope Configurable Bandwidth (Hz) (TYP1 / TYP2) |
5-50 |
|
Accelerometer Range (g) (TYP1 / TYP2) |
+/- 8 |
|
Accelerometer Bias Stability (ug) (TYP1 / TYP2) |
60 |
|
Accelerometer Bias Stability (ug) (Limit) |
100 |
|
Accelerometer Bias Temperature Stability (mg) (TYP1 / TYP2) |
3 |
|
Accelerometer Bias Temperature Stability (mg) (Limit) |
5 |
|
Accelerometer Scale Factor Accuracy (% FSR) (TYP1 / TYP2) |
0.03 |
|
Accelerometer Scale Factor Accuracy (% FSR) (Limit) |
0.1 |
|
Accelerometer Non-linearity (% FSR) (TYP1 / TYP2) |
0.03 |
|
Accelerometer Non-linearity (% FSR) (Limit) |
0.1 |
|
Acceleration VRW (m/s / sqrt(hr)) (TYP1 / TYP2) |
0.05 |
|
Acceleration VRW (m/s / sqrt(hr)) (Limit) |
0.1 |
|
Acceleration Bandwidth (Hz) (TYP1 / TYP2) |
5-50 |
|
Input Voltage (V) |
2.95 – 5.5 |
|
Power Consumption (mW) |
125 |
|
Interface |
SPI or UART |
|
Output Data Rate (Hz) |
<= 200 |
Features |
|
|
Integrated 6 deg/h (Allan Variance) MEMS Gyroscope |
|
|
Integrated 150 ug (Allan Variance) MEMS Accelerometer |
|
|
Dual-Antenna GNSS Integration |
|
|
Integrated INS/GNSS/Odometer/DVL Navigation |
|
|
Supports Dual-Antenna Heading, RTK, and Zero Velocity Update (ZUPT) |
|
|
High Reliability and Robust Environmental Adaptability |
|
|
Widely applicable to UAVs, Surveying & Mapping, Marine Compasses, etc. |
|
Applications |
|
|
Through different software configurations, it can be widely applied in UAVs, surveying and mapping, marine compasses, stabilized platforms, underwater vehicles, and other fields. |
|
Reviews
There are no reviews yet.