


OC-300DL-DGI Fiber Optic Integrated Navigation System


Based on cost-effective closed-loop FOG, accelerometers, and high-end GNSS receiver boards
Multi-sensor fusion and navigation algorithms
Integrated inertial/satellite navigation mode and pure inertial mod
In integrated mode, GNSS positioning data is utilized to output carrier pitch, roll, heading, position, velocity, and time information
Inertial dead reckoning of position, velocity, and attitude after signal loss; pitch and roll remain precise, with short-term heading hold and meter-level positioning accuracy
Integrated navigation mode supports processing via NovAtel IE post-processing softwar
Pure inertial mode provides precise attitude measurement, outputting pitch, roll, and heading, and supports static north-seeking
- Description
- Datasheet
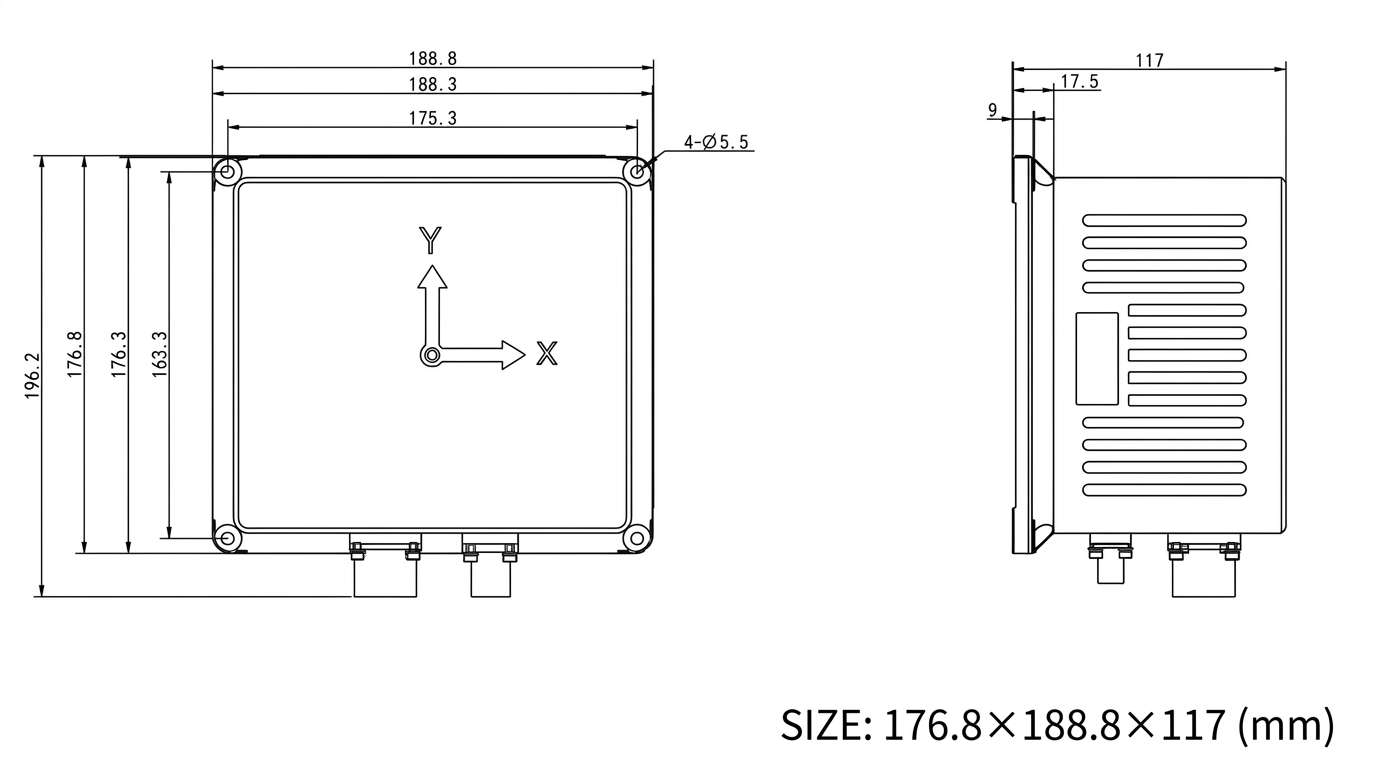
- Outline
- Reviews (0)
Description
The OC-300DL-DGI Fiber Optic Integrated Navigation System is built upon cost-effective closed-loop fiber optic gyroscopes (FOG), accelerometers, and high-end GNSS receiver boards. Through multi-sensor fusion and navigation algorithms, it meets the precise measurement requirements for attitude, heading, and position in applications such as medium-to-high precision mobile mapping systems and large UAVs. The product features integrated inertial/satellite navigation and pure inertial modes. In integrated mode, it outputs data compatible with NovAtel’s IE post-processing software. Upon activation, the pure inertial mode (defined as no GPS fusion since power-on; signal loss after fusion is classified as integrated mode) provides precise attitude measurement, outputting pitch, roll, and heading, and supports static north-seeking.
OC-300DL-DGI |
|
|
OC-300DL-DGI Fiber Optic Integrated Navigation System |
|
Property |
Value |
|
Heading Accuracy (Technical Specifications) |
Integrated Accuracy |
|
Attitude Accuracy (Technical Specifications) |
Integrated Accuracy |
|
Positioning Accuracy (Technical Specifications) |
Positioning holdover accuracy, 60 min outage, CEP |
|
Heading Accuracy (Remarks) |
1° SecL |
|
Heading Accuracy (Value 3) |
RTK, Post-processing |
|
Attitude Accuracy (Remarks) |
0.006° |
|
Attitude Accuracy (Value 3) |
RTK, Post-processing |
|
Position Accuracy (Technical Specifications) |
Horizontal Positioning Accuracy |
|
Position Accuracy (Remarks) |
1.2m |
|
Position Accuracy (Value 3) |
GNSS Standalon |
|
Positioning Accuracy (Remarks) |
2nm |
|
Positioning Accuracy (Value 3) |
Post-processing |
Features |
|
|
Based on cost-effective closed-loop FOG, accelerometers, and high-end GNSS receiver boards |
|
|
Multi-sensor fusion and navigation algorithms |
|
|
Integrated inertial/satellite navigation mode and pure inertial mod |
|
|
In integrated mode, GNSS positioning data is utilized to output carrier pitch, roll, heading, position, velocity, and time information |
|
|
Inertial dead reckoning of position, velocity, and attitude after signal loss; pitch and roll remain precise, with short-term heading hold and meter-level positioning accuracy |
|
|
Integrated navigation mode supports processing via NovAtel IE post-processing softwar |
|
|
Pure inertial mode provides precise attitude measurement, outputting pitch, roll, and heading, and supports static north-seeking |
|
Applications |
|
|
Medium-to-high precision mobile mapping systems and large UAVs |
|
Reviews
There are no reviews yet.